
Has anyone thought of changing out the motherboard all together? If not, does anyone have any suggestions a motherboard to experiment with?
Changing the motherboard
I’ve thought about it. A Rambo board would probably be pretty straight forward. This is basically what the “zim board” is. The only problem I have with these is the 8-bit AVRs they used are straight out of the 90’s. They are very capable parts, just not very high performance. Still the reprap guys have squeezed quite a bit out of it.
If I were to choose a board today, though, I’d go with something like a Smoothieboard. This is based on ARM cortex m3, which is 32-bit processor and much more capable than the AVR. I’ve written a lot of code on both, cortex hands down.
1 Like
Does a Smoothieboard support Marlin or would you go for another Firmware?
I Also thought about changing the board but instead of a second shipment of filament cartridges I changed it to a spare board 
Basically a cheap Ramps should also fit our needs but we would have to change the cables or make 4 pin -> ZIM conversation boards just for the routing.
Nope on Marlin. It uses custom firmware, apparently well written. The additional horsepower in MIPS/RAM have opened up some projects to move to better movement algorithms to replace “constant jerk” algorithm used in Marlin. Apparently this has some potential to reduce the ringing (little ridges or waves after a gap in a surface) and produce better print quality, though people testing it say just slowing down Marlin print speed has the same effect. Other cool things, you can configure things like stepper current in a config file, and has onboard Ethernet, so you can mount the sdcard directly over the network to copy files across.
1 Like
I thought about it. Itd be an adventure for sure. I tried multiple different connectors, by popping the pins out of the existing Zeepro connectors and inserting into other clips and neither of the options worked. So it would require a side board or cutting and crimping all the wires. I also noticed all the wires are just black and red. If the goal was to switch to RAMPS or RAMBO its a waste, but if you went to a Smoothieboard like jpod said it might be worth it.
1 Like
Awesome! thanks for the great input!
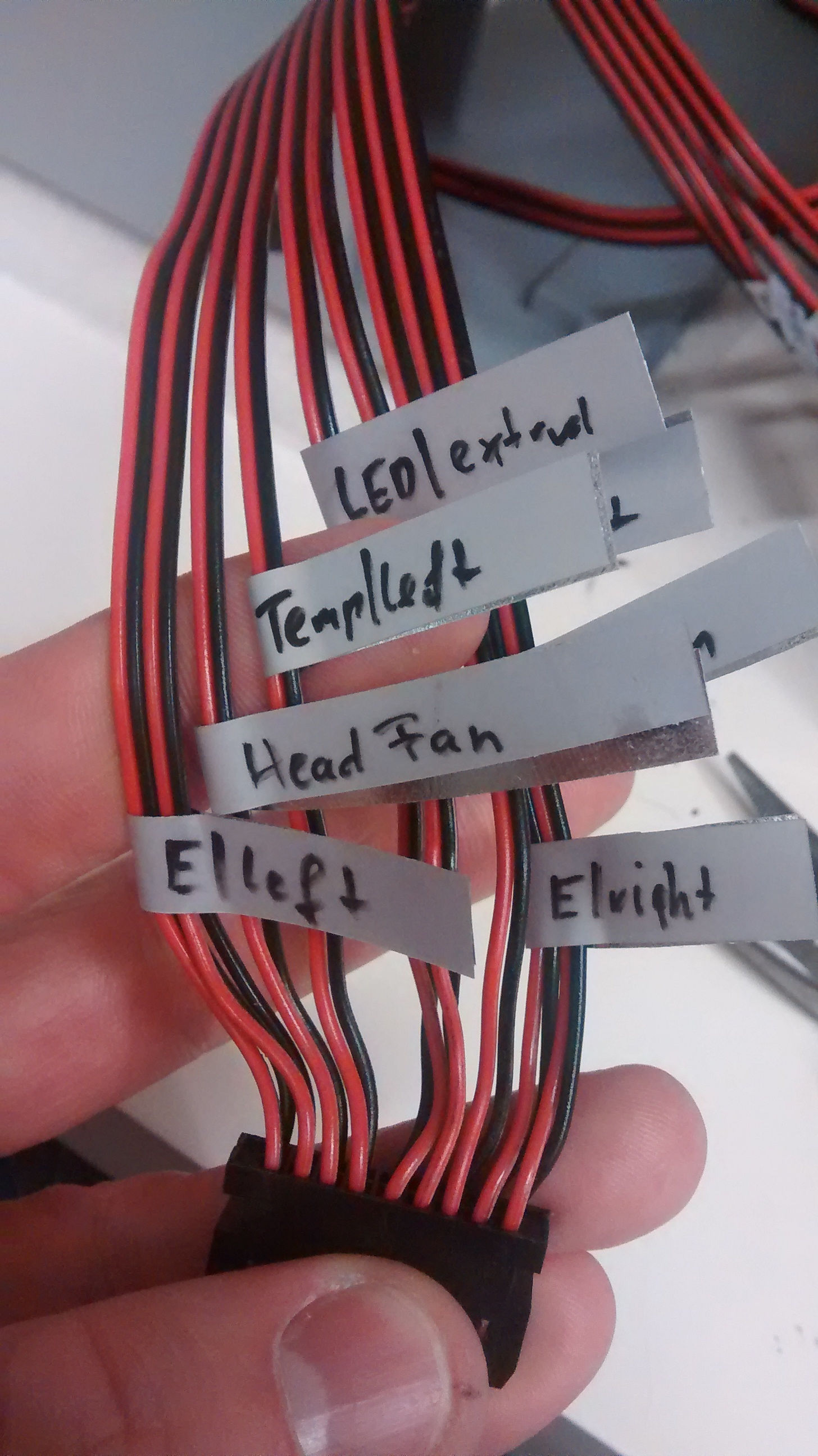
I marked every wire as I wanted to change my board just when I got my ZIM - it’s not a big deal at all!
Here an example:
1 Like
I am changing my Zim board because its burnt and trying to figure the connections in pins.h can anyone please help me understand what is connected to these pins:
#define PRIVATE_ENDSTOPS1 11
#define PRIVATE_ENDSTOPS2 6
#define Commande_Green 42
#define SUICIDE_Zim_PIN 43
#define ATMEL_IN_PUSH 3
#define Endstop_voyage 31
#define Endstop_Z_Movement 32
#define Endstop_Carre 33
Thank you
See this pdf document:
https://tresor.it/s#12D8vo5CkjoDpFQAPPZecQ
(only visible 30 days and 50 downloads so please share )
Thanks KingMartin
found all apart from:
- Endstop voyage
- Endstop Z Movement
- Endstop Carre
does it mean that they are not connected to anything?
I guess the drawings (exports from Eagle Software) are not complete.
You’ll find everything when googling “Ramps board” or similar as our ZIM board is nothing more than an Arduino board with integrated Ramps board (but with other pin settings).
Please post pictures when you successfully changed the board!
Sure i am using Azteeg X3 v2. Me thinking now logically Zim has 8 Mechanical endstops 6 are X Y Z Min and Max, 2 are filament endstops but Voyage, Z movement and Carre can’t find anything on the Zim i have it dismantled in front of me. i will assume they were additions that zim wanted to do but didn’t.
I am trying to install ATX power supply in the Zim i have taken out the lower stepper motors but i am struggling maybe will install it out side. After that i will start either making connectors for the cables or slice them and connect them to Azteeg and see how it goes.
I’m not sure If I get you right, but have you tried to find the endstops and press it? Verify with the following:
http://reprap.org/wiki/G-code#M119:_Get_Endstop_Status
“Returns the current state of the configured X, Y, Z endstops. Takes into
account any ‘inverted endstop’ settings, so one can confirm that the
machine is interpreting the endstops correctly.”
The endstops are all connected to the Board. The filament Sensors are in the E0 and E1 connector, the Z endstops are in the Z connector and so on. That’s why the connectors have more than 4 pins
Does anyone success by changing the motherboard ?
Has anyone documented the switch to a new motherboard for the ZIM? and if so are the still able to use the power button on the front of the zim? I bought a smoothieboard and just trying to get an idea of the time needed to make the switch.
I had success I didn’t use the smoothie board but It should work. When I switched I didnt end up using the power button but I don’t see why it wouldnt be able to work
I am working to replace the first Zims mother board with a MKS sBase 1.3 board, anyone have a config file yet 
@DigitalJax
I have considerable experience with Smoothie and I am working on re-configuring the zim to use the MKS SBase 1.3 board. I have two delta printers that utilize the MKS board as well as each needing different smoothie configs.
I would be happy to assist with a startup config.txt file if anyone is willing to help share the breakdown on the wiring within the ZIM. I see the photo above of the breakdown on the head cable - it would be helpful to see all of the labels so there is no confusion when re-crimping the cables for the MKS board.
Thanks.
Here is a ‘standard’ config for a COREXY machine line the ZIM. I have not tested it as yet since I don’t have the wiring reconfigured as yet. The default_feed_rate and default_seek_rate may need to be adjusted in order to get the machine to print at the optimal speed.
Here is the first crack at the config file - this should be saved in the root of the SD card as “config.txt”
############################################################################
ZeePro ZIM - Fused deposition modeling (FDM) - Smoothieware Config
############################################################################