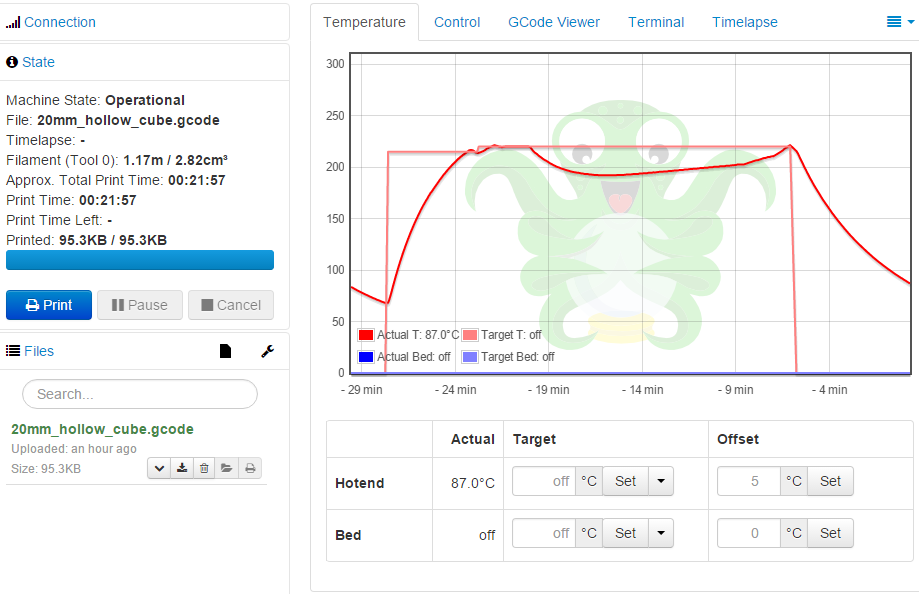
Thanks 3DPrintEvangelist for posting the info about Wifi dongle power management. This was driving me nuts with a previous raspberry pi project. I would find the webpage non-responsive until I connected ssh to the pi (i.e. connected a terminal). I’m pretty certain it is the same issue, and I’ve seen it on my OctoPi as well. Certainly worth disabling that feature.
Another item to be aware of is apparently the wifi dongles can sink enough current to brown out a cheap USB power supply. Some people recommend plugging the pi into a powered hub. I’ve always done ok with a 1amp or greater supply.
Thanks Winston for the bed alignment coordinates and commands. I’m going to set mine up with these right now